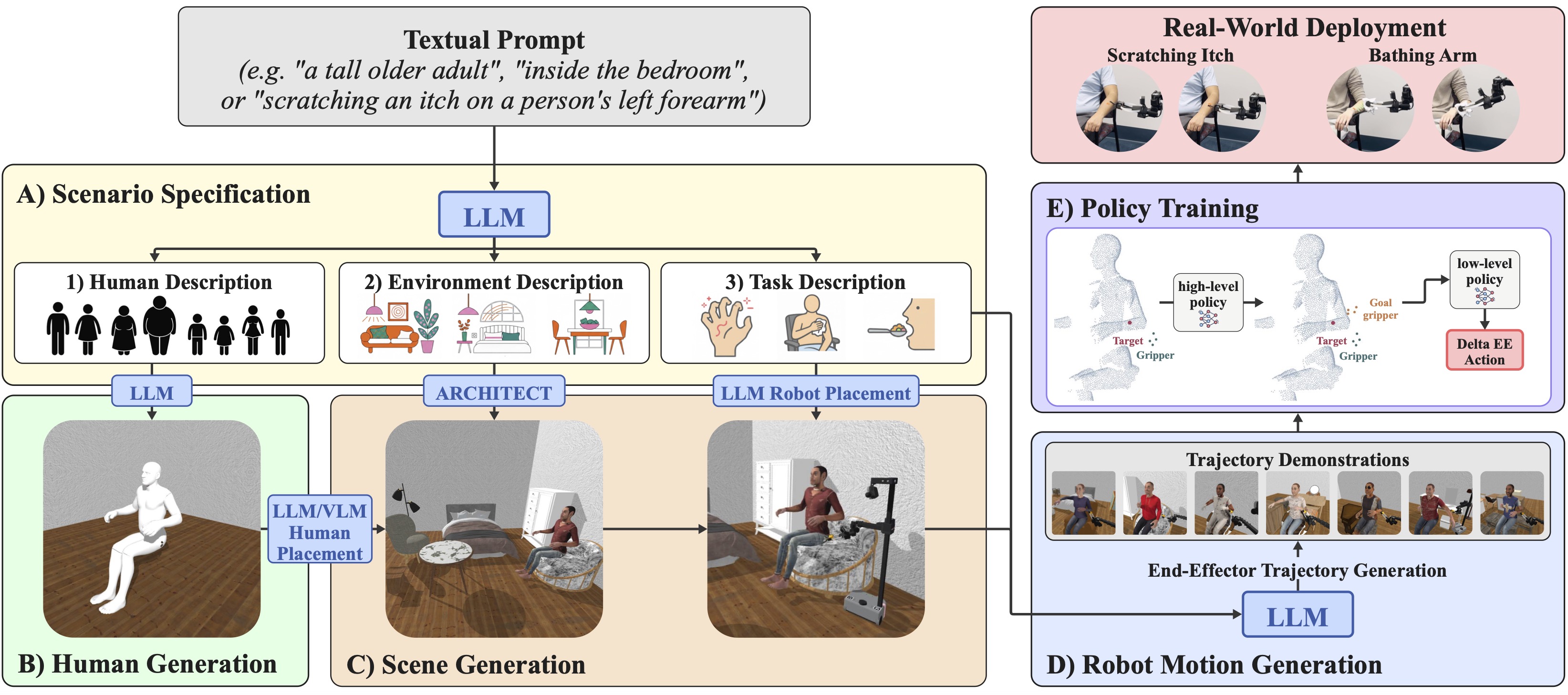
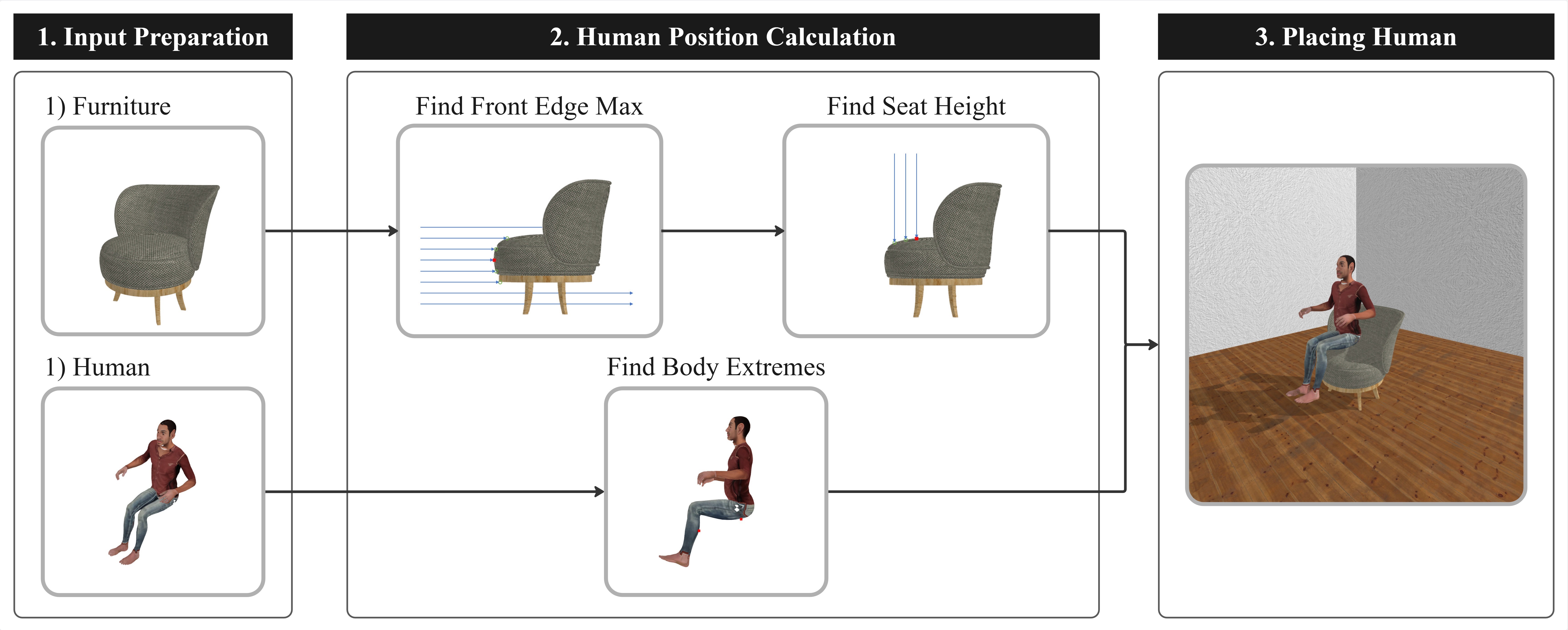
human_description: "A medium-height, broad-shouldered person with a muscular build in a sitting posture."
room_json: {
"floor_objects": [
{
"assetId": "8813acda-0658-4cda-8220-750ec96eba99",
"id": null,
"kinematic": true,
"position": {
"x": 4.6991549384593965,
"y": 0.5201099067926407,
"z": 2.2
},
"rotation": {
"x": 0,
"y": 90,
"z": 0
},
"material": null,
"roomId": null,
"vertices": [
[
604.5,
102.07508444786072
],
[
604.5,
337.9249155521393
],
[
335.3309876918793,
337.9249155521393
],
[
335.3309876918793,
102.07508444786072
]
],
"object_name": "bed-0"
},
{
"assetId": "a8e38746-2e50-4546-96a0-dc7f75c2074f",
"id": null,
"kinematic": true,
"position": {
"x": 4.2,
"y": 0.8254517614841461,
"z": 0.28584778785705567
},
"rotation": {
"x": 0,
"y": 0,
"z": 0
},
"material": null,
"roomId": null,
"vertices": [
[
493.4748739004135,
-4.5
],
[
493.4748739004135,
61.66955757141113
],
[
346.5251260995865,
61.66955757141113
],
[
346.5251260995865,
-4.5
]
],
"object_name": "dresser-0"
},
{
"assetId": "863316e2-050e-4787-822e-c4a6202a9f32",
"id": null,
"kinematic": true,
"position": {
"x": 2.6,
"y": 0.39989787340164185,
"z": 0.5792869079113007
},
"rotation": {
"x": 0,
"y": 0,
"z": 0
},
"material": null,
"roomId": null,
"vertices": [
[
322.5156092643738,
-4.5
],
[
322.5156092643738,
120.35738158226013
],
[
197.48439073562622,
120.35738158226013
],
[
197.48439073562622,
-4.5
]
],
"object_name": "armchair-1"
},
{
"assetId": "94149f77-9373-4637-9972-0ed77f2fa4bd",
"id": null,
"kinematic": true,
"position": {
"x": 2.6,
"y": 0.3885276548098773,
"z": 3.0
},
"rotation": {
"x": 0,
"y": 180,
"z": 0
},
"material": null,
"roomId": null,
"vertices": [
[
314.7334152460098,
354.77037757635117
],
[
314.7334152460098,
245.22962242364883
],
[
205.26658475399017,
245.22962242364883
],
[
205.26658475399017,
354.77037757635117
],
[
314.7334152460098,
354.77037757635117
]
],
"object_name": "table-0"
},
{
"assetId": "18c10bfa-dfe4-455b-85af-7ff839a0a9c6",
"id": null,
"kinematic": true,
"position": {
"x": 2.6,
"y": 0.18432170641608536,
"z": 3.9999999999999996
},
"rotation": {
"x": 0,
"y": 180,
"z": 0
},
"material": null,
"roomId": null,
"vertices": [
[
285.7096956670284,
421.72083139419556
],
[
285.7096956670284,
378.27916860580444
],
[
234.29030433297157,
378.27916860580444
],
[
234.29030433297157,
421.72083139419556
],
[
285.7096956670284,
421.72083139419556
]
],
"object_name": "armchair-0"
},
{
"assetId": "05a04d29-8805-4b8c-b69b-6e353b07b725",
"id": null,
"kinematic": true,
"position": {
"x": 3.8,
"y": 0.5453844904986909,
"z": 4.0
},
"rotation": {
"x": 0,
"y": 180,
"z": 0
},
"material": null,
"roomId": null,
"vertices": [
[
438.92294228076935,
453.73225688934326
],
[
438.92294228076935,
346.26774311065674
],
[
321.07705771923065,
346.26774311065674
],
[
321.07705771923065,
453.73225688934326
],
[
438.92294228076935,
453.73225688934326
]
],
"object_name": "chair-0"
},
{
"assetId": "9a6705ba-471f-4398-ae81-c2984eb95a1b",
"id": null,
"kinematic": true,
"position": {
"x": 1.6,
"y": 0.900574088213034,
"z": 4.2
},
"rotation": {
"x": 0,
"y": 90,
"z": 0
},
"material": null,
"roomId": null,
"vertices": [
[
189.59192872047424,
379.5541340112686
],
[
189.59192872047424,
460.4458659887314
],
[
130.40807127952576,
460.4458659887314
],
[
130.40807127952576,
379.5541340112686
],
[
189.59192872047424,
379.5541340112686
]
],
"object_name": "floor lamps-1"
},
{
"assetId": "9a6705ba-471f-4398-ae81-c2984eb95a1b",
"id": null,
"kinematic": true,
"position": {
"x": 4.8,
"y": 0.900574088213034,
"z": 4.2
},
"rotation": {
"x": 0,
"y": 90,
"z": 0
},
"material": null,
"roomId": null,
"vertices": [
[
509.59192872047424,
379.5541340112686
],
[
509.59192872047424,
460.4458659887314
],
[
450.40807127952576,
460.4458659887314
],
[
450.40807127952576,
379.5541340112686
],
[
509.59192872047424,
379.5541340112686
]
],
"object_name": "floor lamps-0"
}
],
"wall_objects": []
}